2019-10-24 13:18:51
剖析宝马车系主动车速控制技术
一、具有停停走走功能的自适应巡航控制系统
1.概述
随着新型5系车型的推出,新一代ACC传感器取代了之前所熟知的远距离传感器和两个近距离传感器。ACC传感器和ACC控制单元为一个部件。不再安装近距离传感器。近距离传感器的功能由ACC传感器接管。
除了ACC控制单元,还需要一个ICM控制单元(Integrated Chassis Management,一体式底盘管理系统)或一个LDM控制单元(Langsdynamikmanagement,纵向动态管理)进行定速控制。这些控制单元如下所述安装:X6配备了ACC控制单元和一个LDM控制单元。此外,还安装了ICM控制单元,虽然无益于ACC功能。X5配备了ACC控制单元和一个LDM控制单元。其他车辆均安装了ACC控制单元和ICM控制单元。
保养检查时应注意以下提示:通过ICM控制单元或LDM控制单元获取ACC控制单元的诊断信息。因此,ICM控制单元和LDM控制单元是ACC控制单元的网关。如果ICM控制单元或LDM控制单元损坏或未连接,则无法对ACC控制单元进行诊断:控制单元不进行报告。更换过后,务必对ICM控制单元或LDM控制单元进行重新设码。更换ACC控制单元后必须对其重新设码。如果车辆出现前部损伤,就应该注意ACC控制单元支架是不是弯折了。更换ACC控制单元后必须将其重新投入运行:注意相关服务功能。无须进行传感器机械调整。
2.引言
自2007年起就可以使用具有Stop&G”功能的自适应定速控制。作为已知自适应定速控制的补充,该系统具有Stop&G。功能:通过发动机或制动干预进行距离控制和定速控制,直至进入静止状态;在短暂的停车时间(1~3s)后从静止状态中自动启动;自适应动态制动控制(F0x、Flx)。
设置速度时,可在30~180km/h范围内选择:在舒适模式下以10为步进值或在精细模式下以1为步进值。设置速度显示在组合仪表上(可选择平视显示系统)。此外能够在4种距离之间进行选择。
3.部件简短描述
(1) ACC:传感器和控制单元。ACC传感器集成在ACC控制单元内。ACC传感器是一个雷达传感器,测定车前的远处区域(如200m)和近处区域(至60m。ACC传感器探测运动目标的距离、角度以及速度。在ICM控制单元或LDM控制单元中加工数据,如图1所示。

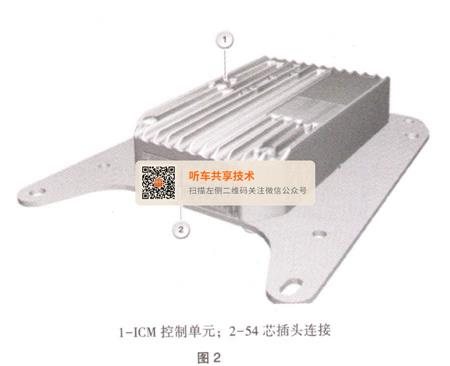
(2) ICM和LDM:一体式底盘管理系统和纵向动态管理,ICM控制单元安装在中央控制台下的变速箱传动轴盖板上,如图2所示。
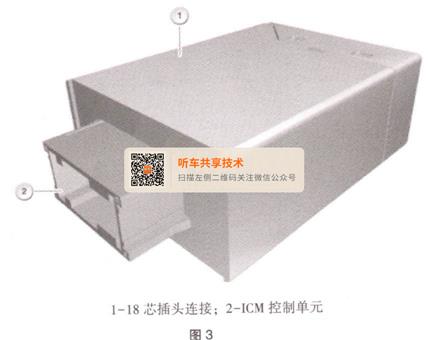
(3) LDM:纵向动态管理(仅适用于X5和X6车辆),LDM控制单元安装在驾驶员侧的脚部空间内(注意左座驾驶型车辆和右座驾驶型车辆),如图3所示。
如果ACC具有停停走走功能,则ICM/LDM控制单元任务如下:汇总ACC传感器传送的目标数据;分析目标并选择与定距控制相关的目标;分析操作信号并生成显示信号;调节速度和距离;生成标准值并通过FlexRay输出到驱动装置和制动器的执行器;监控所有输入信号、控制单元(硬件)以及车辆状态是否有故障或不可信的状态。
(4) S-CAN:传感器CAN。传感器CAN (S-CAN)连接:ICM控制单元或LDM控制单元、ACC传感器。
4.系统功能
(1)功能联网。图4是E70、E71。
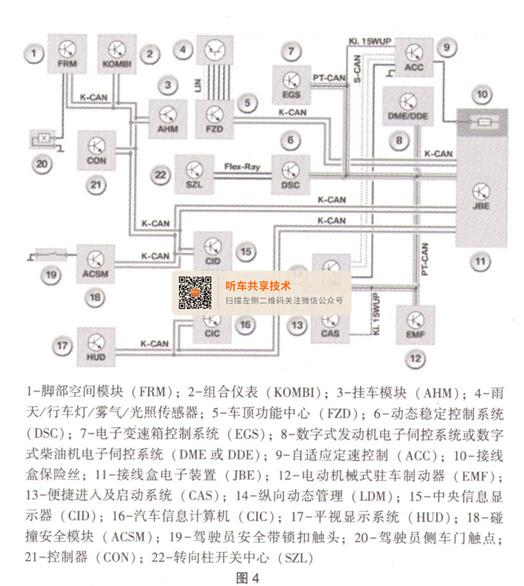
图5为F0x、F1x。
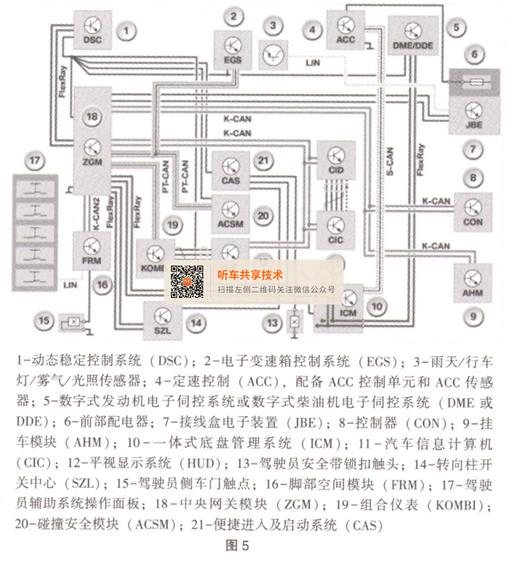
为了实现停停走走功能,需要一个复杂系统网络与分散在其他控制单元中的功能。ICM控制单元或LDM控制单元通过数据总线连接其他控制单元。
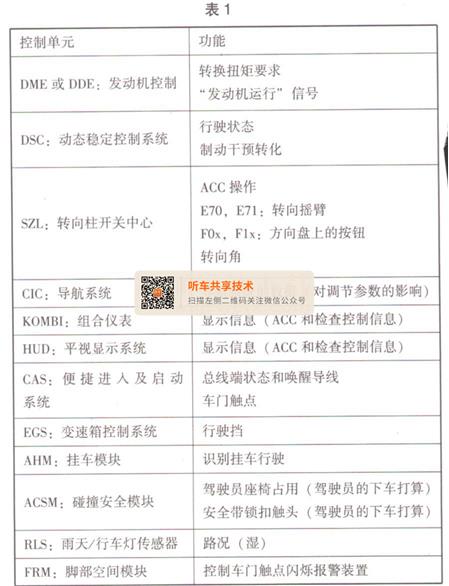
为实现总功能,下列控制单元已联网,见表1。
(2)自适应动态制动控制(F0x、Flx)。ICM控制单元或IDM控制单元具备可适应的动态制动控制功能。自适应型制动辅助系统仅能向带有停停走走功能的自适应定速控制的车辆提供。自适应制动辅助系统在紧急制动情况下提供最大效用。当前面行驶的车辆驾驶员猛然制动时,ACC传感器识别到这种情况。此时,制动辅助系统会提供支持,执行最佳制动,以尽可能避免发生追尾撞车事故。
为此存在下列功能:制动系统的预加注;根据情况匹配DSC中用于制动功能的一些参数;预警:组合仪表或平视显示系统向驾驶员发出视觉报警;紧急报警:向驾驶员发出视觉报警和声音报警。
可通过驾驶员辅助系统操作区内的相关按钮启动自适应动态制动控制。报警功能启用后,可通过iDrive执行下列任务:预警开启和/或关闭;调整预警时间点。
对于定速控制要求驾驶员进行干预或制动的报警,该调整不影响其时间点。自适应型制动辅助系统也可以在未激活ACC停停走走功能的情况下启用。
(3)不希望的系统状态。在达到ACC的功能极限时,可能会出现驾驶员不能理解的系统状态。下面将对这些情况进行描述。
①自己车辆和前面行驶车辆之间的大速度差无法由系统调整。这种情况下,驾驶员应进行制动干预。
②自适应定速控制系统不能对静止的交通堵塞或对面来车做出反应。
③定距控制受雷达传感器识别范围的限制:对于很近并快速拐到自己车辆前面的车辆,需要驾驶员的干预。
④由于雷达传感器的可见视野范围有限,在前面行驶车辆转弯时会丢失目标。这种情况下,应短时抑制设置速度的加速度。原因:防止过于驶近可能仅短时间探测不到的前面行驶车辆。
⑤当ACC传感器(例如)由于积雪过厚而“失明”时,ACC关闭。驾驶员接收到一条检查控制信息。清洁雷达传感器后ACC可以重新激活。注意:ACC传感器前的塑料盖罩损坏会引起ACC传感器的功能故障。
⑥在ASC或DSC较长时间干预时(在临界摩擦系数时),ACC关闭。
⑦雨、雾和雪吸收雷达的射线。ACC的作用距离可能显著减小。在特殊情况下ACC不再可用。
⑧道路的凹凸会导致目标的丢失。
⑨在极个别的情况下,探测到的口标的测量值可能错误(通常是角度)。例如由于雷达波束在隧道壁和护栏上的反射。
⑩温度极低(低于-20℃)时,ACC传感器可能会延时运行。在这种情况下可能无法激活ACC功能。这会在组合仪表中通过“---”显示。
二、具有停停走走功能的自适应巡航控制系统(带距离传感器)
1.概述
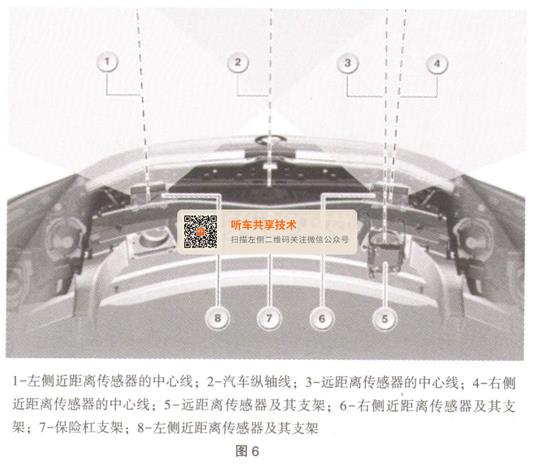
在某些市场上,由于进入限制而提供不带停停走走功能的ACC。如果ACC不带停停走走功能,则不安装近距离传感器,如图6所示。
在售后服务时注意下列提示。
①远距离传感器(LRR)的诊断通过ICM控制单元进行。ICM控制单元因此是LRR控制单元的网关。
如果ICM控制单元损坏或未连接,则不能对LRR进行诊断:控制单元不应答。
②更换后必须对ICM控制单元重新设码。
③在更换后必须重新对远距离传感器进行设码。
④近距离传感器已通过连接插头的线脚布置自动设码(更换近距离传感器后不需要单独设码)。
⑤更换远距离传感器后必须对其重新进行设置:注意相应的服务功能。
⑥更换近距离传感器时,安装时要注意准确的安装位置:按照维修说明。不需要进行类似于远距离传感器的设置。然而必须在ICM控制单元中重新存储该传感器的安装角度。注意相应的服务功能。
2.引言
带停停走走功能的定速控制自2007年以来已经可在5系和6系中提供。作为对熟悉的定速控制的补充,停停走走地行驶能够:通过发动机或制动干预进行定距和定速控制直到静止状态;在短暂的停车时间(1~3s)后从静止状态中自动启动;自适应制动辅助系统。
设置速度时,可在30~180km/h范围内选择:在舒适模式下以10为步进值或在精细模式下以1为步进值。设置速度在组合仪表上显示。此外能够在4种距离之间进行选择。
3.部件简短描述
(1)左右近距离传感器。这两个近距离传感器是雷达传感器(近距离雷达)。为带停停走走功能的ACC安装了2个相同的近距离传感器。这些近距离传感器用一个塑料支架安装在前部保险杠支架上,如图7所示。

近距离传感器通过传感器CAN(S-CAN)与ICM控制单元连接。近距离传感器具有下列任务:计算位置和运动数据、探测车辆前方30m附近范围内的目标。近距离传感器的目标数据只用于带停停走走功能的ACC(不适用于自适应制动辅助系统)。
(2) LRR:远距离传感器。LRR表示远距离雷达,如图8所示。
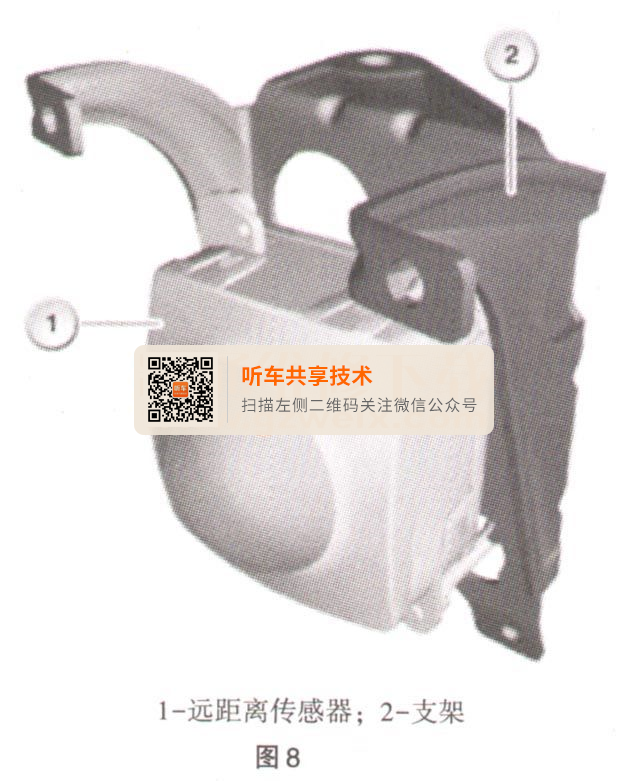
远距离传感器(以前的ACC传感器)是一个雷达传感器。远距离传感器同时还是一个控制单元。因此远距离传感器具有一个控制单元地址,并具有诊断和编程功能。远距离传感器探测运动的目标的距离、角度以及速度。探测范围为车辆前最多150m。在ICM控制单元中,将对这些数据进行处理。
(3) ICM:一体式底盘管理系统。ICM控制单元安装在中央控制台内的变速箱传动轴盖板上。
ICM控制单元执行具有停停走走功能的ACC的下列任务:汇总雷达传感器传送的目标数据;分析目标并选择与定距控制相关的目标;分析操作信号并生成显示信号;调节速度和距离;生成标准值并通过FlexRay输出到驱动装置和制动器的执行器;监控所有输入信号、控制单元(硬件)以及车辆状态是否有故障或不可信的状态。
(4) S-CAN:传感器CAN。传感器CAN(S-CAN)连接:ICM控制单元、远距离传感器(LRR)、近距离传感器。
4.系统功能
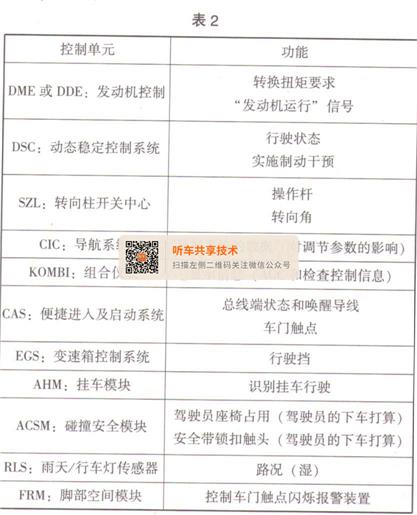
(1)功能联网。为了实现停停走走功能,需要一个复杂系统网络与分散在其他控制单元中的功能。ICM控制单元通过总线与这些其他控制单元连接。为实现总功能,下列控制单元已联网,见表2。
(2)自适应制动辅助系统自适应制动辅助系统是ICM的一项功能。自适应型制动辅助系统仅能向带有停停走走功能的自适应定速控制的车辆提供。自适应制动辅助系统在紧急制动情况下提供最大效用。当前面行驶车辆的驾驶员进行紧急制动,远距离传感器可识别这种情况。此时,制动辅助系统会提供支持,执行最佳制动,以尽可能避免发生追尾撞车事故。
为此存在下列功能:制动系统预充气;根据情况匹配DSC中用于制动功能的一些参数;存在预警时在组合仪表中显示驾驶员视觉报警;在存在紧急警告的情况下,向驾驶员发出视觉和声音报警。
自适应型制动辅助系统可通过驾驶员辅助操作区的相应按钮启用。预警时间点可通过该按钮进行选择(可以分为2级)。自适应型制动辅助系统也可以在未激活ACC停停走走功能的情况下启用。
(3)不希望的系统状态。在达到ACC的功能极限时,可能会出现驾驶员不能理解的系统状态。下面将对这些情况进行描述。
①自己车辆和前面行驶车辆之间的大速度差无法由系统调整。在这种情况下需要驾驶员的制动干预。
②自适应定速控制系统不能对静止的交通堵塞或对面来车做出反应。
③定距控制受雷达传感器识别范围的限制:对于很近并快速拐到自己车辆前面的车辆,需要驾驶员的干预。
④由于雷达传感器的可见视野范围有限,在前面行驶车辆转弯时会丢失目标。这种情况下,应短时抑制设置速度的加速度。原因:防止过于驶近可能仅短时间探测不到的前面行驶车辆。
⑤在雷达传感器“失明”时,例如由于积雪覆盖,ACC自动关闭。驾驶员接收到一条检查控制信息。清洁雷达传感器后ACC可以重新激活。注意:保险杠上近距离传感器区域内的多次喷漆同样会引起近距离传感器“失明”。
⑥在ASC或DSC较长时间干预时(在临界摩擦系数时),ACC关闭。
⑦雨、雾和雪吸收雷达的射线。ACC的作用距离可能显著减小。在特殊情况下ACC不再可用。
⑧道路的凹凸会导致目标的丢失。

⑨在极个别的情况下,探测到的目标的测量值可能错误(通常是角度)。例如由于雷达波束在隧道壁和护栏上的反射。
三、驾驶员辅助系统操作面板
1.概述
驾驶员辅助系统操作单元的最大装备包含以下元件:带功能照明灯的变道警告系统按钮、带功能照明灯的跟随行驶报警系统按钮、带功能照明灯的车道偏离报警装置按钮、BMW夜视系统的按钮、前视投影显示屏按钮。有的按钮都安装了查寻照明灯。查寻照明灯通过LIN-Bus由脚部空间模块(FRM)进行控制。
2.功能描述
操作单元通过LIN总线与脚部空间模块(FRM)或前部车身电子模块(FEM)连接。在脚部空间模块控制单元或前部车身电子模块控制单元中,网关功能包含在LIN总线和K-CAN2之间。
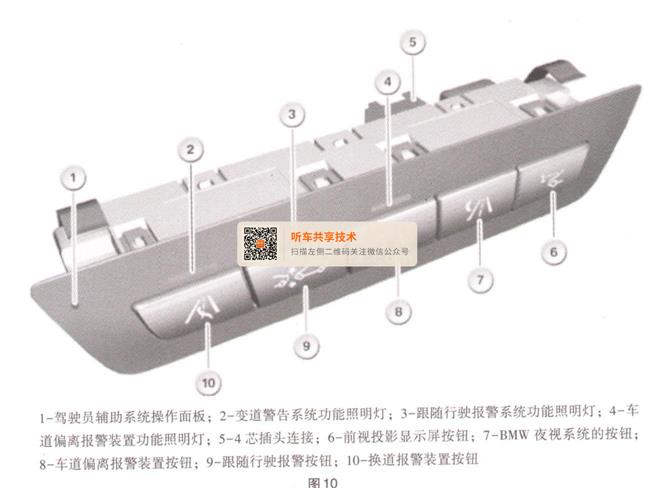
总线端K1.15接通后会对驾驶员辅助系统操作面板的下列功能进行描述,如图10所示。
(1)换道报警装置按钮。变道报警装置是一种驾驶者辅助系统。变道警告系统在换道时对用户起到帮助作用。为此,换道报警装置将利用雷达传感器监控车后和侧面的交通。
变道警告系统只在系统已接通并可使用时才向驾驶员输出报警。通过按压变道警告系统的按钮将按钮信号当作信息在总线上进行发送。一体式底盘管理系统(ICM)的控制单元分析该信息。
只有当系统正常工作时,ICM控制单元才允许接通变道警告系统。要激活按钮的功能照明灯,则通过一个总线信号向脚部空间模块(FRM)或前部车身电子模块(FEM)发出一个正面确认。如果系统中存在故障,则在按下按钮后,功能照明仍会保持关闭。驾驶员可由此识别出换道报警装置不可用。此外还将发出一个检查控制信息。
(2)跟随行驶报警按钮。跟随行驶报警是一项动态制动控制功能。如果与前行车辆的时间差距低于确定的数值,跟随行驶报警在行驶速度超过约15km/h起发出警告。跟随行驶报警要求驾驶通过制动或变道进行干预。
跟随行驶报警分2个等级对可能的碰撞发出警告。
①等级1:预警。通过组合仪表中亮起的红色车辆标志进行预警。等级1的输出阂值可调。通过中央信息显示器中的辅助窗口,可从3个规定等级(早、晚、关闭)中选择预警时间点。
②等级2:声音警告。输出声音警告时,组合仪表中的车辆标志闪烁。另外响起一个声音信号。声音警报要求用户马上采取干预措施。
跟随行驶报警系统只在系统已接通并可使用时才向驾驶员输出报警。通过按压跟随行驶报警系统的按钮将按钮信号当作信息在总线上进行发送。一体式底盘管理系统(ICM)的控制单元分析该信息。只有当系统正常工作时,ICM控制单元才允许接通跟随行驶报警系统。要激活按钮的功能照明灯,则通过一个总线信号向脚部空间模块(FRM)或前部车身电子模块(FEM)发出一个正面确认。如果系统中存在故障,则在按下按钮后,功能照明仍会保持关闭。驾驶员可由此识别出跟随行驶报警系统不可用。此外还将发出一个检查控制信息。
(3)车道偏离报警装置按钮。车道偏离报警装置是一种驾驶员辅助系统。越过行驶轨迹标记时,如果用户未发出灯光信号,系统通过方向盘的轻微抖动警告用户。借助一个摄像机识别所用行驶轨迹的左侧和右侧行驶轨迹标记。车道偏离报警装置只在系统已接通并可使用时才向驾驶员输出报警。通过按压车道偏离报警装置的按钮将按钮信号当作信息在总线上进行发送。基于摄像机的驾驶员辅助系统(KAFAS)的控制单元分析该信息。只有当系统正常工作时,KAFAS控制单元才允许接通车道偏离报警装置。要激活按钮的功能照明灯,则通过一个总线信号向脚部空间模块(FRM)或前部车身电子模块(FEM)发出一个正面确认。如果系统中存在故障,则在按下按钮后,功能照明仍会保持关闭。驾驶员可由此识别出车道偏离报警装置出现故障。此外还将发出一个检查控制信息。
(4) BMW夜视系统的按钮。BMW夜视系统是一个用于夜间视觉辅助的驾驶员辅助系统。BMW夜视系统能够给夜间驾驶带来更高的安全性。BMW夜视系统基于红外线原理。此时识别到通过物体和人发出的热辐射。高温物体显示浅色。低温物体显示深色。可识别性取决于物体与背景的温差和物体的热辐射。与环境温差小或热辐射低的物体的可视性受限。境条件良好时,人体识别功能工作距离为15~100m。通过按压BMW夜视系统的按钮将按钮信号当作信息在总线上进行发送。电子夜视装置(NVE)的控制单元分析该信息。如果系统内存在故障,便会发出检查控制信息。
(5)前视投影显示屏按钮。该系统将重要的信息投影到驾驶员的视野范围内,例如车速。通过按压按钮将按钮信号当作总线信息在总线上进行发送。HUD控制单元分析该信息。此按钮有两个功能,可通过不同长度的按下时间加以区分。
①短按按钮,低于10s:接通或关闭平视显示系统。
②长按按钮,超过10s:调用测试功能。这种模式是为售后服务设计的(例如系统测试)。只要显示第一个测试功能,就可以通过短按按钮调用其他测试功能。再次长按按钮超过los,可结束测试功能。
3.结构及内部连接
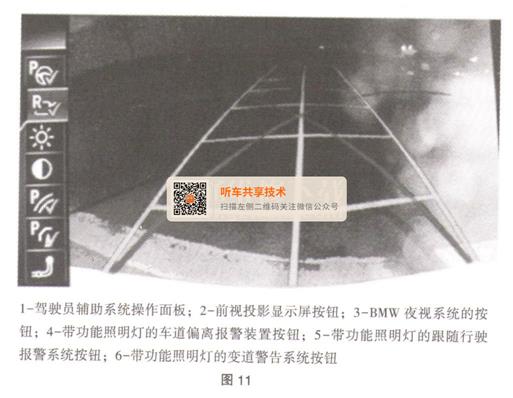
驾驶员辅助系统操作面板通过一个4芯插头连接与车载网络连接,如图11所示。LIN总线连接操作单元与脚部空间模块(FRM)或前部车身电子模块(FEM)。接线盒中的配电器通过总线端KI. 30F为操作面板供电。
线脚布置见表3。

4.标准值
驾驶员辅助系统操作面板的额定值见表4。

5.诊断提示
在驾驶员辅助系统的操作面板上原则上只会有个别按钮失灵。在单个按钮失灵时,预计将出现以下情况:脚部空间模块(FRM)或前部车身电子模块(FEM)内出现故障记录。
如果驾驶员辅助系统操作单元和脚部空间模块(FRM)或前部车身电子模块(FEM)之间的总线通信(LIN总线)出现断路,则预计将出现以下情况:脚部空间模块(FRM)或前部车身电子模块(FEM)内出现故障记录;组合仪表上出现检查控制信息;按钮的功能检查可通过诊断系统进行。
四、带警示闪烁开关的驾驶员辅助系统操作单元
1.概述
辅助系统通过一个唯一的按钮操作。根据装备,可提供帮助的一个或多个下列系统可以避免危险的碰撞。
跟随行驶报警、行人避让警告、车道偏离报警装置、变道警告系统。显示和操作方案已经整合到一个该按钮上。另外集成有警示闪烁开关。通过按压警示闪烁开关,将打开闪烁报警灯。此时会同时激活所有的转向信号灯,警示闪烁开关的功能显示灯会一起闪烁。
2.功能描述
一些辅助系统在通过启动/停止按钮启动发动机后自动激活,如图12所示。

按下驾驶员辅助系统操作单元按钮:
①在中央信息显示器上显示一个菜单。可以进行设置。针对目前使用的主钥匙保存个性化的设置。
②短按驾驶员辅助系统操作单元按钮:辅助系统根据个性化设置单个关闭。根据个性化设置,LED亮橘黄色或熄灭。
③重新按下驾驶员辅助系统操作单元按钮:所有辅助系统打开:LED亮绿色。
④重新按下驾驶员辅助系统操作单元按钮:所有辅助系统关闭:LED熄灭。
3.结构及内部连接
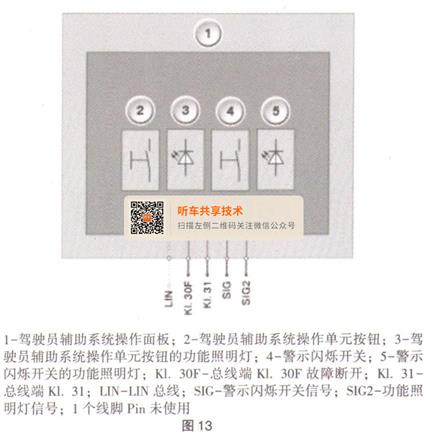
驾驶员辅助系统操作面板通过一个6芯插头连接与车载网络连接,如图13所示。局域互联网总线连接辅助系统操作设备与车身域控制器(BDC)。车身域控制器(BDC)上的配电器利用总线端30F为驾驶员辅助系统操作单元供电。
4.标准值
驾驶员辅助系统操作面板的额定值见表5。

5.诊断提示
在驾驶员辅助系统的操作面板上原则上只会有个别按钮失灵。在单个按钮失灵时,预计将出现以下情况:车身域控制器(BDC)中的故障记录。
驾驶员辅助系统操作单元和车身域控制器(BDC)之间的总线通信(局域互联网总线)中断时,预计将出现以下情况:车身域控制器(BDC)中的故障记录;组合仪表上出现检查控制信息;按钮的功能检查可通过诊断系统进行。
五、自适应巡航控制系统(ACC =Active Cruise Control)
1.概述
新型ACC传感器取代了迄今已知的远距离传感器和两个近距离传感器,如图14所示。ACC传感器和ACC控制单元是1个部件。这个部件位于前挡板一个可拆卸的格栅后面。

作为已知自适应定速控制的补充,该系统具有Stop&Go功能:通过发动机或制动干预进行距离控制和定速控制,直至进入静止状态;在短暂的停车时间(1-3s)后从静止状态中自动启动;自适应制动辅助系统。
2.功能描述
设置速度可以在30~180km/h的范围内进行选择:在舒适模式下以10为步进值或在精细模式下以1为步进值。设置速度将在组合仪表中显示出来(也可以通过平视显示系统)。此外能够在4种距离之间进行选择。
ACC传感器集成在ACC控制单元中。ACC传感器是一个雷达传感器,负责测量车辆前的远距离范围(200m以内)和近距离范围(60m以内)。
1CM控制单元为带有停停走走功能的自适应巡航控制系统承担下列任务:汇总雷达传感器传送的目标数据;分析目标并选择与定距控制相关的目标;分析操作信号并生成显示信号;调节速度和距离;生成标准值并通过FlexRay输出到驱动装置和制动器执行器;监控所有输入信号、控制单元(硬件)以及车辆状态是否有故障或不可信的状态。
3.结构及内部连接
ACC控制单元通过一体式底盘管理系统(1CM)与S-CAN(传感器CAN)连接,如图15所示。传感器CAN以500kB/s的传输速度工作。传感器CAN具有两个均为12051的终端电阻。其中一个位于一体式底盘管理系统(ICM)中,另一个集成在ACC控制单元中。前部配电器通过总线端k1.15N为ACC控制单元供电。
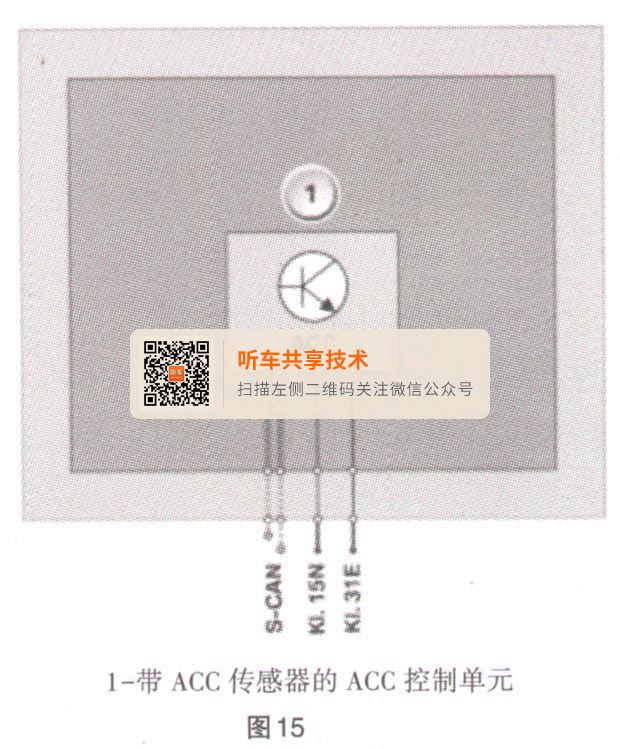
在图15中只画出了电源和总线连接。当前的线脚布置可以在ISTA诊断系统的电路图中查询。通过点击电路图中的符号,可以激活选项卡“安装位置”和“线脚布置”。
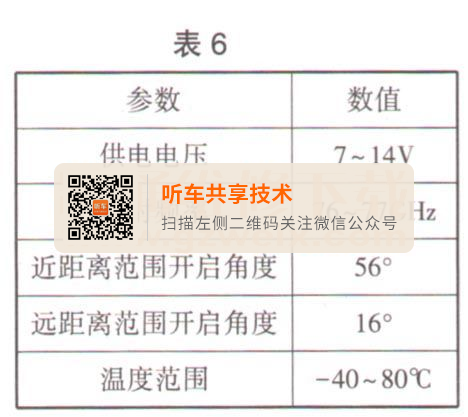
4.标准值
ACC控制单元和ACC传感器的标准值见表6。
5.诊断提示
与ACC控制单元的通信失灵时执行标准检测程序(通用检测过程)。存在某个控制单元内部故障时,预计将出现以下情况:定速控制(ACC)控制单元中的故障记录;组合仪表上出现检查控制信息。提示:未预期的系统状态。
在达到ACC的功能极限时,可能会出现驾驶员不能理解的系统状态。
这种情况将在定速控制的功能描述中加以说明。
来源:网络