2019-10-23 14:28:36
剖析宝马车系驻车辅助系统技术
一、驻车距离报警系统
1.概述
驻车距离报警系统PDC是一种特种装备。驻车距离报警系统(Park Distance Control)为驾驶员提供驻车和离开辅助。因此也能充分利用小停车位。同时将减少驻车损坏情况。PDC利用超声波传感器,在感知范围内对目标进行距离测量。对于开关条件,请注意用户手册。
缓慢地接近目标(车辆之前或之后)将通过以下方式发出信息:声音报警、可视报警。提示:PDC不是独立的控制单元。PDC集成在接线盒电子装置(JBE)内,但是有自己的控制单元地址以及诊断地址。
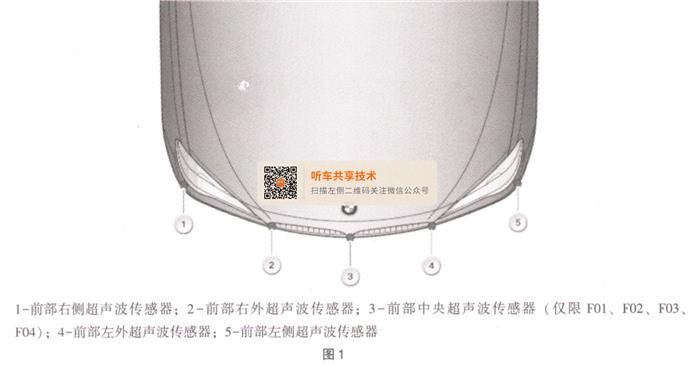
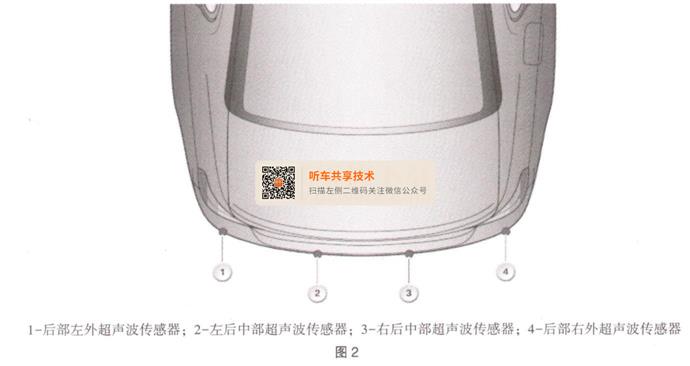
超声波传感器采用了全新布置(适用于F01、F02、F03、F04)。前保险杠上安装了5个超声波传感器。在后保险杠上安装了4个超声波传感器,如图1为BMW7系前部超声波传感器的布置,图2为BMW7系后部超声波传感器的布置。
2.部件简短描述
将描述驻车距离报警系统的下列部件:超声波传感器、组合收发模式。
在发送和接收组合模式中,超声波传感器首先依次发射出一组超声波脉冲。然后,超声波传感器将接收由感知范围内的一个目标所反射回来的回声脉冲。该回声脉冲在超声波传感器内被放大,并作为数字信号被转发至接线盒电子装置(JBE)。JBE根据回声脉冲的运行时间计算出目标的距离。
接收模式。在接收模式中,超声波传感器将接收相邻超声波传感器所发出的回声脉冲。JBE可由此对最多3个超声波传感器的信号进行分析。通过分析多个超声波传感器的信号,计算出车辆和目标之间的最小距离,如图3所示。

所有超声波传感器都有自己的电子装置。前部和后部超声波传感器分别有一个共用供电和一个共用控制单元的接地端。
中央控制台操纵装置上的PDC按钮。驻车距离报警系统用PDC按钮开启或关闭(参见操作说明)。PDC开启后,功能LED将亮起。PDC按钮位于中央控制台操纵装置内。PDC按钮在电气上与控制器(CON)连接,如图4所示。

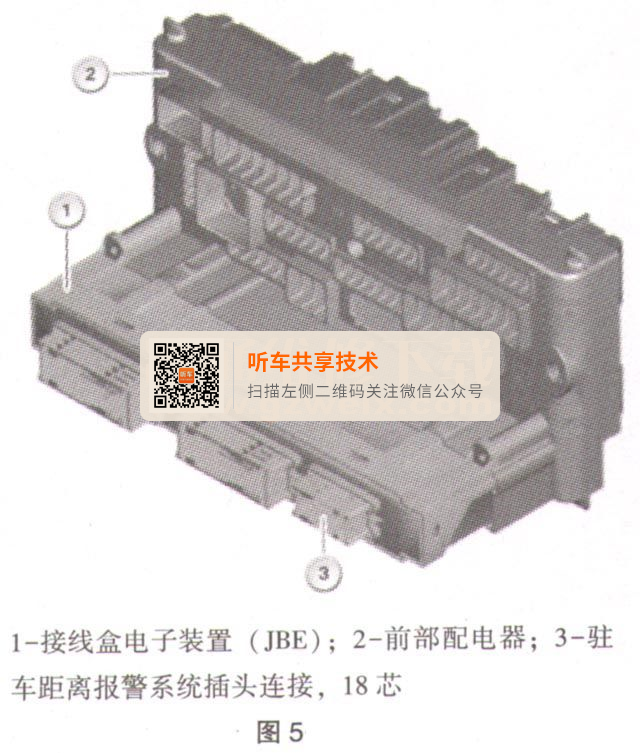
JBE:接线盒电子装置。接线盒电子装置(JBE)控制超声波传感器发送超声波脉冲。JBE还能接收各个超声波传感器的数字信号。JBE根据各个数字信号计算出超声波传感器和目标之间的最小距离。在识别到一个目标时会发出一个可视报警,并根据与目标之间的距离发出一个声音报警,如图5所示。
3.系统功能
PDC具有下列功能:系统网络、声音报警、可视报警、检查控制、系统限制。
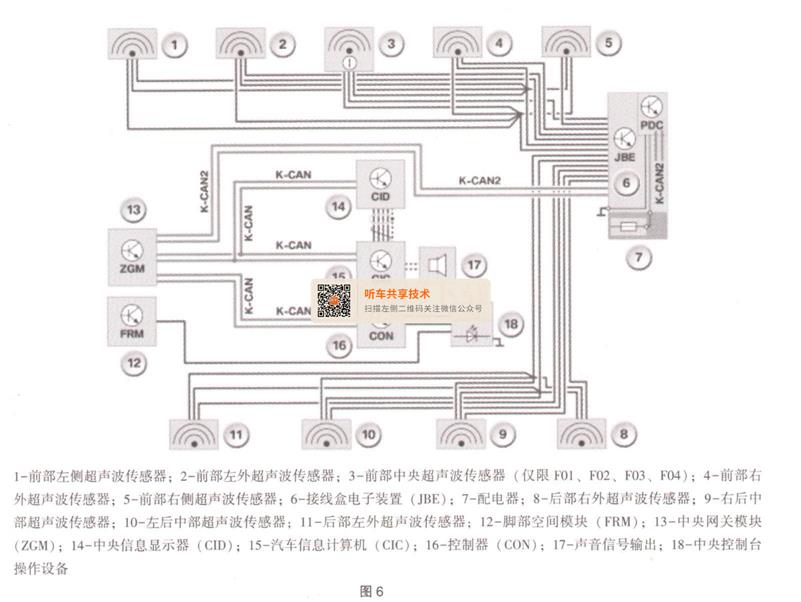
(1)系统网络,如图6所示。
(2)声音报警。在接近一个物体时,会根据其位置通过一个间歇鸣响进行指示。例如,如果在车辆左后方识别到一个物体,便会从左后扬声器中发出信号音。与物体的距离越短,声音间歇就越短。如果与识别到的物体之间的距离小于等于约25cm,则发出持续鸣响。如果车辆前方和后方的物体的距离都小于等于约25cm,则发出交替持续鸣响。
间歇鸣响在以下条件下,在约3s后中断:停在仅由最外侧超声波传感器识别到的物体前,例如在平行于一面墙行驶时;在挂人选挡杆位置P后,信号音被关闭。
(3)可视报警。PDC的视觉报警在中央信息显示器(CID)上显示。一旦PDC被激活,便会出现显示。视觉报警的触发比声音报警早。车辆前方和后方的感知范围均不超过约2m。图形显示在CID中产生。接线盒电子装置(JBE)通过K-CAN提供超声波传感器和所感知的物体之间的距离数据。CID上的PDC画面是一个带超声波传感器感知范围的车辆平面图。与感知目标的距离用红绿灯颜色显示。距离101~200 (250) cm:绿色;距离51~100cm:黄色;距离少于50cm:红色。
(4)检查控制。如果PDC内存在故障,便会显示检查控制信息。在PDC图像上,车辆前后的区域以阴影显示。PDC失灵。用诊断功能检查系统,如图7所示。

(5)系统限制。注意还要观察交通状况。PDC无法替代驾驶员自己对交通状况的判断。还需要通过直接观察来检查车辆周围的交通状况。否则,便可能由于诸如PDC感知范围之外的车辆和行人,或物体而造成发生事故的危险。车辆内部和外部的强声源可能盖过PDC的信号音。运行中由于功能范围的限制,可能出现(对驾驶员而言)需要澄清的系统功能:为此应注意操作说明。对于开关条件,同样应注意操作说明。
故障查询的工作步骤。提示:检查超声波传感器的机械状态。进行故障查询前首先检查超声波传感器的机械状态。注意超声波传感器是否正确安装在其支架和去藕元件中,是否无污物、冰和雪。
提示:在选挡杆处于N位置时固定住车辆,以防溜车。在挂人选挡杆位置P后,信号音被关闭。所以在选挡杆位置N上检查PDC的功能,另外把车辆保险锁死以防其自行移动。
提示:故障查询时避免出现其他影响参量。在故障查询过程中,任何可探测到的物体都不允许在超声波传感器的感知范围内近于lm(前部和侧面)以及2m(后部)。
提示:注意分隔元件在超声波传感器上的正确位置。适合的去藕元件正确位置是重要的。否则将影响发射和接收性能。
提示:注意牌照底座的装配。在安装警察规定的牌照及牌照底座时必须注意,不得覆盖保险杠中部的传感器。牌照支架或附着在支架上的污物和冰雪等可能会影响中部传感器的功能,从而可能导致发出错误警告。
注意有关牌照底座的以下规定:牌照不允许超出牌照底座的上边缘;欧洲规格:在安装牌照时请使用钻孔模板。注意安装规定;中国规格和美规:额外安装了一个牌照底座。这个牌照底座与牌照一起不允许突出原有牌照底座的上边缘;前部不允许安装经销商提供的牌照底座(例如由BMW分部提供的、带经销商名称的底座)。
提示:不要加工超声波传感器。超声波传感器不允许进行油漆。既不允许补漆,也不允许整体涂漆。
提示:清洁超声波传感器。高压清洗设备不得长时间对超声波传感器固定喷射,且要至少保持30cm的距离。
二、驻车距离报警系统(PDC)
1.概述
根据车型系列、生产时间和车辆装备,PDC控制单元也组合PMA控制单元使用(PMA表示泊车辅助系统)。
驻车距离报警系统(Park Distance Control)为驾驶员提供驻车和驶离辅助。因此也能充分利用小停车位。同时将减少驻车损坏情况。驻车距离报警系统(PDC)利用超声波传感器,在感知范围内对目标进行距离测量。
2.功能描述
PDC控制单元控制超声波传感器发射超声波脉冲。PDC控制单元也接收各个超声波传感器的数字信号。PDC控制单元通过对比各个数字信号计算出超声波传感器和目标之间的最小距离。当识别到目标时,输出声音报警或视觉报警,如图8所示。

3.结构及内部连接
PDC控制单元是K-CAN上的总线用户。每个超声波传感器都直接与PDC控制单元连接。PDC控制单元为所有超声波传感器供电和接地,如图9所示。
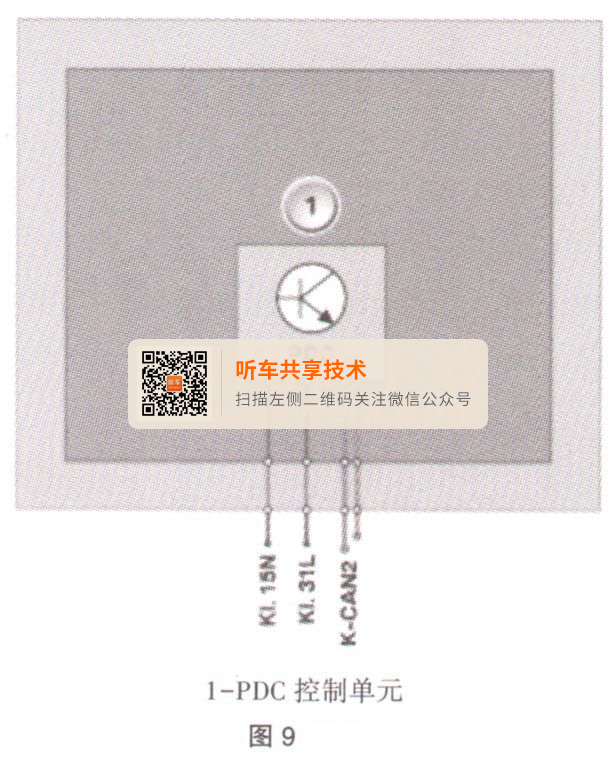
在图5-7-9中只画出了电源和总线连接。当前线脚布置可以在诊断系统ISTA(综合业务技术应用程序)的电路图中查找。通过点击电路图中的符号,可以激活选项卡“安装位置”和“线脚布置”。
4.标准值
PDC控制单元的标准值见表1。

5.诊断提示
PDC控制单元失灵时,预计将出现以下情况:组合仪表上出现检查控制信息。更换PDC控制单元或超声波传感器后无须试运行。但控制单元会在每次启动过程时检查超声波传感器的软件是否与控制单元软件兼容。如果不兼容,在PDC控制单元中会出现一个相应的故障代码。这种情况下必须执行服务功能更新超声波传感器的软件。
PDC控制单元自行监控故障并在需要时记录相应的故障记录。特殊情况下无法记录。PDC控制单元在下列情况下无法进行识别:超声波传感器(包括密封环)安装或放置错误时或超声波传感器区域侧围受损时。这可能导致下列无故障记录的客户投诉:只能识别很少的小型车位;驻车后,车辆与前面的车非常贴近或距离很远;驻车后,车辆与路边石非常贴近或距离很远;车辆斜着停放在车位上。这种情况下必须正确安装超声波传感器并且检查超声波传感器区域的侧围是否损坏(参见故障症状)。
三、超声波传感器
1.概述
驻车距离报警系统(Park Distance Control)为驾驶员提供驻车和离开辅助。因此也能充分利用小停车位。同时将减少驻车损坏情况。PDC利用超声波传感器,在感知范围内对目标进行距离测量。
F0x、F1x; PDC集成在接线盒电子装置(JBE)内。
F2x、F3x ; PDC集成在车尾电子模块(REM)中,或在配备了特殊装备“泊车辅助系统”的情况下集成在PMA中。
F45、F55、F56、101、112:驻车距离报警系统和驻车辅助系统的两个功能通过相同的控制单元实现:标准型PMA控制单元:驻车距离报警系统(PDC);高级型PMA控制单元:驻车距离报警系统(PDC)和泊车辅助系统(PMA)。
取决于车型系列、年款和车辆装备,前保险杠中安装了4或5个超声波传感器。带5个超声波传感器的车辆:仅限F01、F02、F03、F04。原因:为监控优化了几何形状。
在后保险杠内安装了4个超声波传感器。前后保险杠内的超声波传感器在电气和几何形状方面都是相同的。
2.功能描述
这些超声波传感器发射超声波脉冲。障碍物反射这些超声波脉冲(回声脉冲)。超声波传感器接收并放大这些回声脉冲。接着这些被放大过的回声脉冲被转换成一种数字信号,如图10所示。

每个超声波传感器都有一套自己的电子装置以及自己的一根连接相应控制单元的数据导线:F0x、F1x:接线盒电子装置(JBE);F2x、Fax:后部电子模块或泊车辅助系统(PMA) ; F45、F55、F56、101、112: PMA控制单元(标准型或高级型)。
相应控制单元在打开点火开关时将当前的车辆数据提供给超声波传感器(工作存储器)。超声波传感器被泊车辅助系统控制单元置于组合收发模式或纯接收模式。
在收发组合模式下,一个保险杠内的超声波传感器首先依次发出一个超声波脉冲包。然后,超声波传感器将接收由感知范围内的一个目标所反射回来的回声脉冲。该回声脉冲在超声波传感器得到加强,然后作为数字信号转发至泊车辅助系统控制单元。泊车辅助系统控制单元根据回声脉冲的运行时间计算出目标距离。
在接收模式中,超声波传感器将接收相邻超声波传感器所发出的回声脉冲。泊车辅助系统控制单元最多可分析3个超声波传感器的信号(“三边测量”=圆割线=相邻传感器同时“监听”)。通过多个超声波传感器的信号分析,计算出车辆和目标之间的最小距离。
3.结构及内部连接
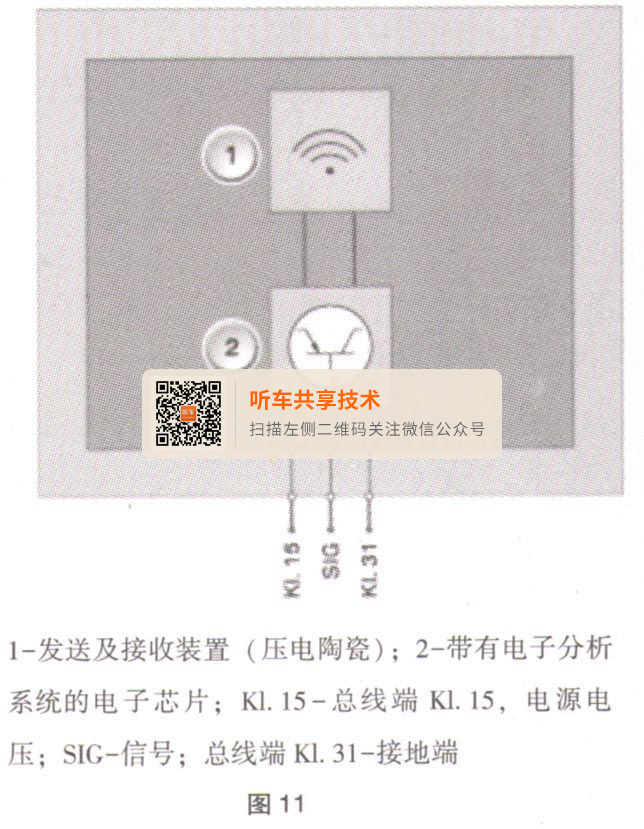
前后保险杠内的超声波传感器在电气和几何形状方面都是相同的。超声波传感器有一个较小的膜片(该设计的优势)。该膜片均已上漆。通过传感器外壳上的分隔元件,可采用结构上较小的膜片。超声波传感器在其电子装置中有一个可设码和可编程的内存。这样,便能有目的地对回声接收的灵敏度施加影响。因此,超声波传感器可跨车型使用。所有超声波传感器都有自己的电子装置。前后超声波传感器都有一个共同的电源和接地,如图11所示。
4.测量方法及额定值
超声波传感器由泊车辅助系统控制单元通过总线端K1.15供电,如图12所示。
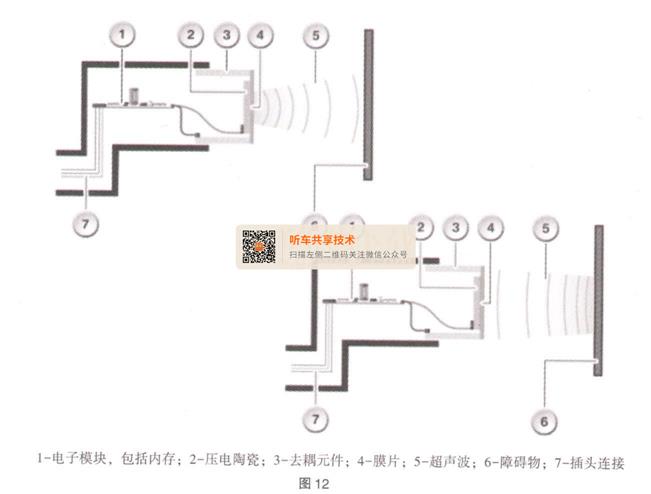
超声波传感器的额定值见表2。

5.诊断提示
在超声波传感器失效时,预计将出现以下情况:F0x、F1x:接线盒电子装置(JBE)中出现故障记录;F1x、F2x:后部车身电子模块(FEM)或泊车辅助系统(PMA)内出现故障记录;F45、F55、F56、101、112: PMA控制单元(标准型或高级型)。
检查控制信息和灰色PDC图像。
6.一般提示
提示:根据车型系列,PDC集成在不同的控制单元中。F0x、F1x; PDC所起的作用就像控制单元内的控制单元。在物理上,PDC位于JBE内。但是PDC有专用控制单元地址。F2x、Fax ; PDC集成在车尾电子模块(REM)中,或在配备了特殊装备“泊车辅助系统”的情况下集成在PMA中。F45、F55、F56、101、112:驻车距离报警系统和驻车辅助系统的两个功能通过相同的控制单元实现:标准型PMA控制单元:驻车距离报警系统(PDC);高级型PMA控制单元:驻车距离报警系统(PDC)和泊车辅助系统(PMA)。
提示:检查超声波传感器的机械状态。进行故障查询前首先检查超声波传感器的机械状态。同时应注意,超声波传感器是否正确固定在其支架内(分隔元件),且没有污垢、冰雪。
提示:超声波传感器不允许进行油漆。既不允许补漆,也不允许整体涂漆。
提示:清洁超声波传感器。高压清洗设备不得长时间对超声波传感器固定喷射,且要至少保持10cm的距离。
四、泊车辅助系统(PMA)
1.概述
泊车辅助系统(与驻车距离报警系统PDC连接的特种装备SA5DP)在驾驶员寻找车位以及在纵向狭窄车位驻车时向其提供帮助。这种辅助系统一方面在需要时通知驾驶员车位空隙是否足以驻车,另一方面通过独立的转向运动以最佳的角度将车辆引人车位。车位可以位于驾驶员侧也可以位于前乘客侧。驾驶员通过加速踏板拉杆和制动踏板杆控制车辆。同时驾驶员可以完全不用考虑转向任务,只需将注意力完全集中于周围环境,提前识别可能的危险情况。
2.部件简短描述
泊车辅助系统控制单元。PMA控制单元安装在后面板旁的行李箱槽中。泊车辅助系统与FlexRay总线系统相连。PMA控制单元含有一个用于FlexRay的终端电阻,如图13所示。

与超声波传感器的通信通过一根局域互联网总线完成。两个超声波传感器由PMA控制单元供电。
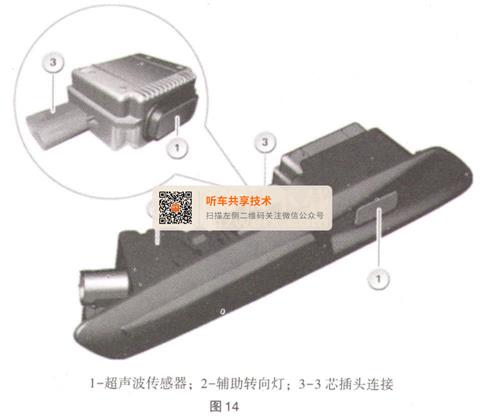
泊车辅助系统的超声波传感器。泊车辅助系统的两个超声波传感器安装于前侧围辅助转向灯旁边。两个超声波传感器的功能与驻车距离报警系统(PDC)的超声波传感器的功能类似:都是发出超声波脉冲然后再接收回声脉冲,然后由PMA控制单元分析信号,以此计算出车位的长度和深度,如图14所示。
超声波传感器通过局域互联网总线与PMA控制单元相连。
3.功能联网
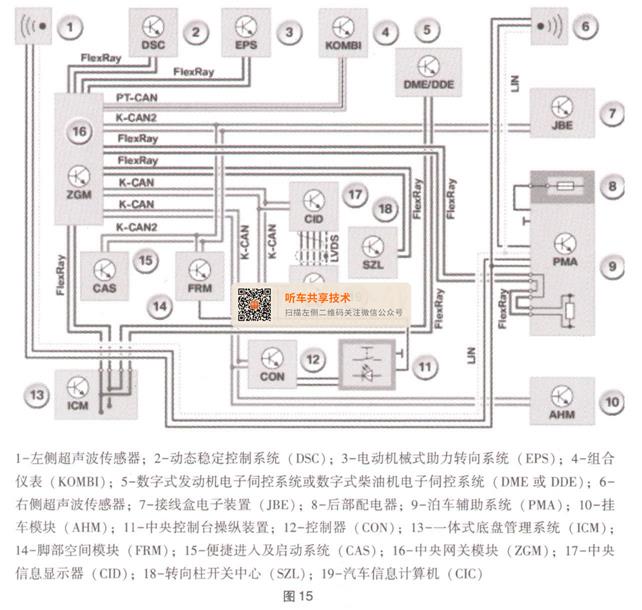
泊车辅助系统由PMA控制单元和2个测量车位的超声波传感器组成。由电动机械式助力转向系统(EPS)执行驻车控制单元计算出的转向运动。借助于泊车辅助系统的复杂功能,许多控制单元都可以通过总线系统交联,如图15所示。
泊车辅助系统可以通过PDC按钮或挂人倒车挡激活。接下来的操作由控制器完成。系统借助驻车距离报警系统(PDC)的超声波传感器监控驾驶员的纵向引导。通过中央信息显示器(CID)向驾驶员显示驻车过程。
挂车行驶以及在急弯道行驶时无法使用泊车辅助功能。使用限制和显示方式请注意车主手册。
4.系统功能
行驶经过时(速度低于36km/h)自动测量车位。功能激活后,通过CID向驾驶员显示,车位是否合适。启动驻车过程后:通过CID提示驾驶员倒车、制动以及向前行驶。驻车过程可以通过一步或多步完成。
此驻车过程在下列情况下会被取消:最大驻车速度超过10km/h;闪光灯选择错误(例如本该是右边,却选成了左边);驻车过程有障碍物导致事故危险(即使是在对面);驾驶员干扰转向;任意车门打开;挡位选择错误;DSC识别到滑差。以上任意一个导致驻车取消的原因都会以一条信息记录在PMA控制单元的故障代码存储器中。原因并非系统故障,而是用户的误操作。取消后系统会检查,是否可以重新驻车。必要时驾驶员可以立即重新驻车。
5.售后服务提示
更换PMA控制单元或超声波传感器后无须试运行。但控制单元会在每期启动时检查,传感器的软件是否与控制单元软件兼容。如果不兼容,在PMA控制单元中会出现一个相应的故障代码。这种情况下必须执行服务功能更新超声波传感器的软件。PMA控制单元自行监控故障并在需要时记录相应的故障记录。特殊情况下无法记录。控制单元在下列情况下无法进行识别:超声波传感器(包括密封环)安装或放置错误时;或超声波传感器区域的侧围损坏时。这可能导致下列无故障记录的客户投诉:只能识别很少的小型车位;驻车后,车辆与前面的车非常贴近或距离很远;驻车后,车辆与路边石非常贴近或距离很远;车辆斜着停放在车位上。这种情况下必须正确安装超声波传感器并且检查超声波传感器区域的侧围是否损坏(参见故障症状)。
五、泊车辅助系统表现症状的分析
1.不能通过PDC控制单元识别的车辆故障的影响
泊车辅助系统的功能可能受不能通过PDC控制单元识别的车辆故障的干扰。
下列提问帮助定位可能的原因:
(1)所有超声波传感器是否都正确安装?超声波传感器必须牢固安装在支架中并嵌人。超声波传感器必须在支架中或保险杠套管中对中安装。超声波传感器的反射角必须正确(由支架在保险杠上的位置和保险杠本身决定)。连接超声波传感器的导线不允许有拉力。(在低温下拉应力可能增大并可能导致导线损坏)
(2) PDC控制单元是否已正确设码和编程?
(3)下列必要时与泊车辅助系统配合工作的组件是否无故障?倒车挡信号、PDC按钮、扬声器、声音信号、屏幕、组合仪表、主机、倒车摄像机、其他环境识别系统。
2.车辆上的安装件的影响
车辆上的安装件可能引起超声波信号反射并因此导致意外的障碍物识别。
下列提问帮助定位可能的原因:
(1)车辆上是否安装有附加安装件?附加安装件举例:车外安装的备用轮胎、附加远光灯、附加保险杠、自行车架、加长排气尾管。如有必要,拆除附加安装件并重新检查泊车辅助系统的功能。
(2)是否安装有挂车挂钩?如有必要,检查挂车挂钩与车辆的兼容性,并检查安装是否正确。检查护罩是否已正确插到挂车挂钩的球头上?(牢固插上护罩,直到其嵌人。只可使用原装护罩)
(3)牌照和牌照支架是否正确安装?是否安装了不合适的牌照支架(牌照支架不允许伸出到定位件上方)?如有必要,拆除牌照和牌照支架并重新检查泊车辅助系统的功能。提示:对于带后部和前部泊车辅助系统的E87,通过Progman为在瑞士使用的可转换牌照支架提供一个设码方案。
3.由于环境条件的影响
泊车辅助系统的功能可能受环境影响的干扰。环境影响引起功能故障的可能原因有:超声波传感器受污染;超声波传感器的膜片和壳体之间有异物(例如砾石、昆虫);超声波传感器在零下低温时结冰;膜片上有冰或白霜;膜片和壳体之间有冰;从膜片到壳体有桥状坚冰;在零下低温时洗车后残留的水结冰;强降雨时嚼啪落上的水。
4.来自车辆环境的影响
泊车辅助系统的功能受来自车辆环境的下列影响干扰。在对泊车辅助系统进行功能测试时,在下列距离内不允许有任何障碍物:车辆前后至少2m距离,车辆侧面至少1m距离。
地面的隆起、边沿和沟槽可能被识别成障碍物。具有良好反射特性的路面在特殊情况下可能被识别成障碍物。这些EMV干扰源例如有:石块路面、有横向沟槽的路面、有沟槽的路面、有埋人式铁轨的路面、有坑洼的路面、砾石。
某些地面形状可能由于车辆位置被识别成障碍物:这些EMV干扰源例如有:弯折、下陷、斜面、车速限值。此影响在路面潮湿时增大。
泊车辅助系统探测区域内的浓废气团或强热气团可能在特殊情况下引起假障碍物识别。下列情况可能引起假障碍物识别:剧烈加速时的废气流;低车外温度时的废气流;排气管朝障碍物(例如墙壁、另一部车辆)排气;车辆在发动机炽热时静止不动,热气团进入泊车辅助系统的探测区域。
车辆环境中的超声波信号源可能影响泊车辅助系统的功能。这些超声波信号源例如有:空气压力驱动的装置,冲击式螺丝起子、压缩机等;清洁装置(例如蒸汽喷射器);运转的机器、大的发动机噪声、摩托车、载重车;旁边驶过车辆的轮胎滚动噪声,尤其在下雨和高速行驶时;强降雨。
车辆环境中的EMV干扰源同样可能影响泊车辅助系统的功能。这些EMV干扰源例如有:充电器、感应回路、间歇亮起的荧光灯管、车库门驱动装置、电动机。
5.不易识别的障碍物
由系统条件决定,泊车辅助系统很难识别下列障碍物:积雪覆盖的障碍物,尤其是粉末状雪(超声波可能被吸收);表面疏松的障碍物(超声波可能被吸收);表面光滑的障碍物(超声波可能不被反射到超声波传感器);距离低于20cm的近距离障碍物;在30cm距离时达到持续鸣响,务必立即停车;较低的障碍物即使已经被识别到,在继续接近时仍可能从泊车辅助系统的探测区域内消失;在超声波传感器的安装位置较高时尤其如此。
来源:网络

